IKnowHow seeks an innovator for a planning use-case in open call #2 for innovators. We spoke with Michalis Logothetis to learn more about this opportunity.

Founded in 2002 in Athens iKnowHow is a Greek SME of around 100 employees that provides custom-built robotics and automation solutions to the industry and software solutions to the public and private sectors. During 2016, IKH merged with Innora, a highly innovative robotics and control company, and has transformed into a one-stop-shop when it comes to robotics, embedded systems, and computer vision combined into data-driven intelligence. .
iKnowHow’s core competencies span across 3 distinct business units:
- Digital Health
- Digital Transformation
- Robotics, IoT & Automation
Specifically, to the third business unit, the company specializes in Service Robotics (simulators, mechatronics, industrial design, inspection, NDT), Data Driven Intelligence(computer vision, cognitive control, human-machine interfaces) and Internet of Things (embedded control, instrumentation, connectivity).
Michalis Logothetis is the lead Robotics Engineer in the Innovation Department of IknowbohemHow S.A. He received his Diploma in Engineering with a background in Electrical and Computer Engineering from National Technical University of Athens in 2016 and has over 5 years of research and technical experience in the field of robotics and automatic control through multi-discipline projects. Dealing with a variety of robotic platforms, such as AGV, mobile or static manipulators, strength his ability to design and develop reliable and robust navigation and control systems both in electronics and ROS software.
For what specific problem are you seeking a solution?
ORESTIS is a custom designed Autonomous Ground Vehicle (AGV) operating as a robotic brush mower that can perform the task of grass cutting, surveillance and monitoring in an automated manner for preventive maintenance purposes. The large and complex operating workspace in combination with the required mowing time interval imposes constraints on the optimization of the developed solution regarding the mechanical design, autonomy and dexterity of the robot. This generates the need of developing optimal paths and sequences of tasks to achieve the required performance with minimum cost and commissioning effort. To this end, the development and integration of an efficient Task and Motion Planning (TAMP) algorithm is of utmost importance as it optimizes the robot operation with respect to efficiency, robustness, and flexibility. To be more specific, an efficient AI-based task and motion planning scheme will be responsible to generate optimal paths and sequences of actions considering the workspace limitations (areas with rough localization, obstacles, charging station location), maximum field coverage, autonomy and user defined tasks.
What would you like to realize with your partner from open call #2 for innovators?
The grass cutting operation is the most essential for the described solution. This should be performed in an optimal way with respect to execution time, area coverage and safety. The following constraints make the trajectory generation for grass cutting field coverage quite complex and the traditional methods unsuitable to provide an optimal solution.
- Full coverage of the workspace
- Minimize time with no GNSS/RTK localization
- Obstacle avoidance
- Minimize number of turns in the path
- Dynamic decisions
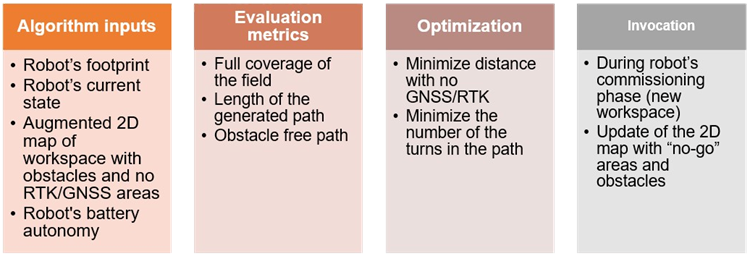
AIPlan4EU could provide us with a planner able to handle those constraints and provide a safe, reliable and efficient path for grass cutting taking as input the robot footprint and the augmented 2D map of the workspace with information about obstacles and no GNSS/RTK areas.